 | PID制御:比例・微分・積分要素を用いた幅広く用いられる制御技術,PID Control | 2021/06/19 18:44 | 00:07:47 | 28,869 | 273 | 12 | 0.99% |
![[30分でわかる] 制御工学の様々な手法を各1分で解説](https://i.ytimg.com/vi/4pNQcqr-DT4/default.jpg) | [30分でわかる] 制御工学の様々な手法を各1分で解説 | 2021/06/06 18:45 | 00:28:49 | 23,615 | 383 | 15 | 1.69% |
 | 卒業研究発表・修論発表・学会発表(卒論発表や研究発表ためのプレゼンテーション・スライド作成技術)Presentation and making slides method, Master thesis | 2021/05/19 18:45 | 00:10:28 | 22,169 | 204 | 2 | 0.93% |
 | 重ね合わせの理,テブナンの定理,ノートンの定理 Superposition Theorem, ThLevenin's theorem and Norton's theorem | 2021/05/31 17:15 | 00:09:39 | 20,966 | 229 | 8 | 1.13% |
 | 卒論発表part1 | 2020/06/02 18:30 | 00:08:18 | 16,224 | 159 | 3 | 1% |
 | LMI and control (with some MATLAB simulations) 📖Linear matrix inequalities📖 | 2020/07/20 11:02 | 00:11:54 | 16,190 | 183 | 30 | 1.32% |
![[制御] 伝達関数 part 1 (伝達関数とは?)【工学】✅](https://i.ytimg.com/vi/Pzbbp4h8cEs/default.jpg) | [制御] 伝達関数 part 1 (伝達関数とは?)【工学】✅ | 2021/05/21 18:45 | 00:04:19 | 14,921 | 122 | 2 | 0.83% |
 | 制御工学チャンネル(紹介Movie)#熊大情電 #制御理論 #制御工学 | 2022/11/26 11:49 | 00:00:36 | 14,451 | 113 | 8 | 0.84% |
 | 【学会発表】国内学会での発表(プレゼンテーション・発表練習) | 2020/06/26 11:59 | 00:10:08 | 14,247 | 98 | 2 | 0.7% |
 | 【総まとめ】状態空間モデルに基づく制御の総集編【最適レギュレータ・オブザーバ・極配置・可制御・現代制御論】 | 2022/12/18 12:46 | 00:57:32 | 13,747 | 85 | 2 | 0.63% |
![[制御] 伝達関数 part 2 (ボード線図)【工学】✅](https://i.ytimg.com/vi/2D99L4fFLaY/default.jpg) | [制御] 伝達関数 part 2 (ボード線図)【工学】✅ | 2021/05/15 12:58 | 00:08:03 | 13,322 | 78 | 1 | 0.59% |
 | 学術論文誌・国内学会予稿・国際学会プロシーディングス(論文の書き方) | 2021/05/24 18:45 | 00:12:16 | 13,065 | 182 | 3 | 1.42% |
 | 【安定性判別】制御システムに対するラウスの安定判別法 | 2021/09/13 19:00 | 00:02:35 | 12,038 | 111 | 8 | 0.99% |
 | 固有値とは?実践で使える正方行列と固有値の話 | 2021/10/07 18:05 | 00:03:28 | 11,906 | 49 | 5 | 0.45% |
 | 制御工学チャンネルのチャンネル紹介動画 #shorts | 2022/12/07 20:25 | 00:00:25 | 11,828 | 30 | 2 | 0.27% |
![[制御] 状態方程式 part 1 (制御システムの状態空間表現)【工学】✅](https://i.ytimg.com/vi/B4sQMW6f6u0/default.jpg) | [制御] 状態方程式 part 1 (制御システムの状態空間表現)【工学】✅ | 2021/05/16 18:00 | 00:05:11 | 11,363 | 94 | 4 | 0.86% |
 | ラプラス変換1 (ラプラス変換の基礎)【工学】✅ | 2021/05/23 18:45 | 00:04:05 | 11,113 | 77 | 6 | 0.75% |
 | トランジスタを用いた小信号増幅回路(オーディオアンプ、スピーカーなど) | 2022/07/14 13:04 | 00:06:04 | 10,706 | 74 | 1 | 0.7% |
 | フィルタによる信号処理(ローパスフィルタ,ハイパスフィルタ,ゲイン線図)電気回路 | 2021/03/16 15:07 | 00:09:14 | 9,909 | 81 | 2 | 0.84% |
![[古典制御] 伝達関数 part 1 (伝達関数とは?)](https://i.ytimg.com/vi/6AnvDtN5MQ8/default.jpg) | [古典制御] 伝達関数 part 1 (伝達関数とは?) | 2020/06/11 11:45 | 00:05:12 | 9,703 | 76 | 2 | 0.8% |
![[制御] 状態方程式 part 1 (システムの状態方程式表現)【工学】](https://i.ytimg.com/vi/UmFV4BuP_YM/default.jpg) | [制御] 状態方程式 part 1 (システムの状態方程式表現)【工学】 | 2020/06/15 10:11 | 00:05:37 | 9,628 | 61 | 1 | 0.64% |
 | クレーンの振れ止め制御(最大振れ角が少ない制御を実現するには? | 2022/07/17 14:29 | 00:02:35 | 8,835 | 42 | 4 | 0.52% |
 | PID制御シミュレーション(MATLAB) | 2021/06/25 18:45 | 00:02:27 | 8,680 | 62 | 10 | 0.83% |
 | 大学研究室での研究の進め方(卒業研究を進める流れ) | 2021/05/26 18:45 | 00:05:42 | 7,770 | 136 | 0 | 1.75% |
![[制御] 伝達関数 part 2 (ボード線図)【工学】](https://i.ytimg.com/vi/z7-ZwaswGdk/default.jpg) | [制御] 伝達関数 part 2 (ボード線図)【工学】 | 2020/06/18 11:45 | 00:11:06 | 7,431 | 49 | 2 | 0.69% |
](https://i.ytimg.com/vi/kqmG-KIIzn4/default.jpg) | 【制御工学】離散時間システムpart 1 [連続時間状態方程式の離散化](制御理論#3) | 2020/06/20 14:20 | 00:12:43 | 7,409 | 94 | 2 | 1.3% |
 | ナイキストの安定判別法 (一巡伝達関数01)【工学】✅伝達関数 part 4 | 2021/05/27 18:45 | 00:05:45 | 7,279 | 36 | 1 | 0.51% |
 | ラプラス変換2(ラプラス変換による過渡応答の計算)【工学】✅MATLAB数値シミュレーション | 2021/05/25 18:45 | 00:06:35 | 7,039 | 39 | 1 | 0.57% |
 | 行列の固有値を3秒で求めよ #shorts | 2022/12/08 18:00 | 00:00:17 | 7,034 | 45 | 3 | 0.68% |
 | 【卒論】スライド作成&良い発表にするための方法【理系学生向け】(音声あり) | 2020/04/21 11:14 | 00:11:45 | 6,967 | 40 | 0 | 0.57% |
 | 非線形制御入門(様々な非線形理論、フィードバック線形化、モデル予測制御、制御リアプノフ関数)(制御理論#2)✅ | 2021/05/28 18:45 | 00:08:46 | 6,618 | 105 | 1 | 1.6% |
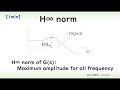 | (Control engineering) H infinity norm (1 minute explanation) | 2020/07/03 10:28 | 00:00:26 | 6,483 | 35 | 2 | 0.57% |
 | 【制御工学の総まとめ】古典制御・伝達関数に基づく制御の総集編【PID制御・ラプラス変換・ボード線図・ブロック線図・最終値定理】 | 2022/12/31 20:00 | 00:52:44 | 6,436 | 65 | 1 | 1.03% |
![[最適制御] 状態方程式 part 6 (最適レギュレータ)【工学】✅](https://i.ytimg.com/vi/8GbKBDU2eIw/default.jpg) | [最適制御] 状態方程式 part 6 (最適レギュレータ)【工学】✅ | 2021/05/17 12:53 | 00:10:56 | 6,243 | 64 | 1 | 1.04% |
 | ロバスト制御(モデル誤差抑制補償器によるロバスト化) | 2021/06/10 18:45 | 00:24:43 | 5,639 | 68 | 2 | 1.24% |
 | 卒論発表の準備を進めたい。どうすればいい? #shorts | 2023/01/26 18:45 | 00:00:13 | 5,636 | 90 | 3 | 1.65% |
 | ロバスト制御(制御理論#1)【数学】 | 2021/06/01 18:45 | 00:03:37 | 5,323 | 58 | 0 | 1.09% |
![[制御] 状態方程式 part 4 (極配置と応答波形)【工学】✅](https://i.ytimg.com/vi/MUrI469J_Oo/default.jpg) | [制御] 状態方程式 part 4 (極配置と応答波形)【工学】✅ | 2021/05/17 12:53 | 00:11:22 | 5,185 | 42 | 1 | 0.83% |
](https://i.ytimg.com/vi/oKahn6rwkPQ/default.jpg) | 【デジタル制御】離散時間システム [連続時間状態方程式の離散化と安定性](制御理論#3#4) | 2021/05/30 18:45 | 00:15:34 | 5,166 | 83 | 0 | 1.61% |
 | Inverted pendulum with graphs #shorts #control #electronics | 2023/10/19 16:16 | 00:00:27 | 5,097 | 88 | 2 | 1.77% |
 | 制御工学入門 安定性(伝達関数、状態方程式) | 2020/06/09 17:06 | 00:01:33 | 5,077 | 22 | 2 | 0.47% |
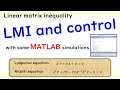 | 📖LMI and control (with some MATLAB simulations) ✅Linear matrix inequalities✅ | 2021/06/07 18:45 | 00:06:08 | 5,006 | 45 | 8 | 1.06% |
![[制御] 伝達関数 part 6 (ブロック線図)【工学】](https://i.ytimg.com/vi/z_gHRqTXit4/default.jpg) | [制御] 伝達関数 part 6 (ブロック線図)【工学】 | 2020/08/07 11:45 | 00:03:06 | 4,786 | 37 | 3 | 0.84% |
 | 2023制御工学チャンネル(紹介Movie) #熊大情電 #制御理論 #制御工学 | 2023/01/11 18:00 | 00:00:36 | 4,735 | 13 | 4 | 0.36% |
 | モデル予測制御 Model Predictive Control, MPC | 2023/12/11 18:00 | 00:04:58 | 4,732 | 73 | 4 | 1.63% |
![[制御] 伝達関数 part 6 (ブロック線図)【工学】✅](https://i.ytimg.com/vi/NtwCu7OJtpk/default.jpg) | [制御] 伝達関数 part 6 (ブロック線図)【工学】✅ | 2021/05/31 18:45 | 00:02:50 | 4,659 | 35 | 1 | 0.77% |
![[制御] 状態方程式 part 6 (状態フィードバック#3 最適レギュレータ)【工学】](https://i.ytimg.com/vi/6XbCj0Abydw/default.jpg) | [制御] 状態方程式 part 6 (状態フィードバック#3 最適レギュレータ)【工学】 | 2020/06/08 11:53 | 00:12:16 | 4,553 | 67 | 16 | 1.82% |
 | 電気回路 テブナンの定理 #shorts | 2023/03/13 18:45 | 00:00:17 | 4,548 | 39 | 1 | 0.88% |
 | 【制御工学】ロバスト制御(制御理論#1) | 2020/05/31 12:54 | 00:04:51 | 4,526 | 49 | 3 | 1.15% |
 | モデル誤差抑制補償器:MEC併用による既存制御システムのロバスト化 Model Error Compensator | 2023/04/12 18:00 | 00:34:42 | 4,519 | 49 | 2 | 1.13% |
![制御工学チャンネル [制御工学の専門チャンネル]](https://yt3.ggpht.com/6c_vuNa3wCRorHOVUWnMr4P4riUlUSjJGQcOnjBgRlKMXlA2hqnYFGruHI8y1rWM2oargntcQg=s176-c-k-c0x00ffffff-no-rw)


![[30分でわかる] 制御工学の様々な手法を各1分で解説](https://i.ytimg.com/vi_webp/4pNQcqr-DT4/default.webp)




![[制御] 伝達関数 part 1 (伝達関数とは?)【工学】✅](https://i.ytimg.com/vi_webp/Pzbbp4h8cEs/default.webp)



![[制御] 伝達関数 part 2 (ボード線図)【工学】✅](https://i.ytimg.com/vi_webp/2D99L4fFLaY/default.webp)




![[制御] 状態方程式 part 1 (制御システムの状態空間表現)【工学】✅](https://i.ytimg.com/vi_webp/B4sQMW6f6u0/default.webp)



![[古典制御] 伝達関数 part 1 (伝達関数とは?)](https://i.ytimg.com/vi_webp/6AnvDtN5MQ8/default.webp)
![[制御] 状態方程式 part 1 (システムの状態方程式表現)【工学】](https://i.ytimg.com/vi_webp/UmFV4BuP_YM/default.webp)



![[制御] 伝達関数 part 2 (ボード線図)【工学】](https://i.ytimg.com/vi_webp/z7-ZwaswGdk/default.webp)
](https://i.ytimg.com/vi_webp/kqmG-KIIzn4/default.webp)







![[最適制御] 状態方程式 part 6 (最適レギュレータ)【工学】✅](https://i.ytimg.com/vi_webp/8GbKBDU2eIw/default.webp)



![[制御] 状態方程式 part 4 (極配置と応答波形)【工学】✅](https://i.ytimg.com/vi_webp/MUrI469J_Oo/default.webp)
](https://i.ytimg.com/vi_webp/oKahn6rwkPQ/default.webp)



![[制御] 伝達関数 part 6 (ブロック線図)【工学】](https://i.ytimg.com/vi_webp/z_gHRqTXit4/default.webp)


![[制御] 伝達関数 part 6 (ブロック線図)【工学】✅](https://i.ytimg.com/vi_webp/NtwCu7OJtpk/default.webp)
![[制御] 状態方程式 part 6 (状態フィードバック#3 最適レギュレータ)【工学】](https://i.ytimg.com/vi_webp/6XbCj0Abydw/default.webp)


